Share
Pin
Tweet
Send
Share
Send
El dispositivo se ensambla sobre la base de un microcontrolador ATMEGA 8 L asequible en un paquete TQFP32 barato y un motor del disco duro (HDD) de una computadora, que se puede extraer de un disco duro viejo. El circuito contiene un número mínimo de partes y puede complementarse con una funcionalidad arbitraria. Está alimentado por dos baterías de iones de litio de tamaño estándar 18650, voltaje de 3.7 voltios, conectadas en serie.
El riego se realiza en porciones fijas cada 24 horas.
El único botón es una prueba de trabajo, después de presionarlo, el riego posterior se realizará exactamente al mismo tiempo con una precisión de un segundo. (Simplemente lo incluí en vacaciones, sin configuración, por lo que puede ofrecerlo como una opción de regalo, sin instrucciones innecesarias).
Características de diseño:
- funcionamiento con batería durante varios meses (bajo consumo de energía);
- dosis muy precisa de riego e intervalos exactos entre riego;
- no criticidad del circuito a los detalles y su disponibilidad;
- falta de partes vivas móviles en el motor y, como resultado, durabilidad y confiabilidad cuando se trabaja en agua;
- muy bajo ruido durante la operación del motor;
- no requiere ninguna configuración (riego una vez al día) con acompañamiento de sonido y luz;
- protección contra descarga profunda de baterías con una advertencia audible sobre la necesidad de una carga;
- apagado automático de la indicación de luz por la noche.
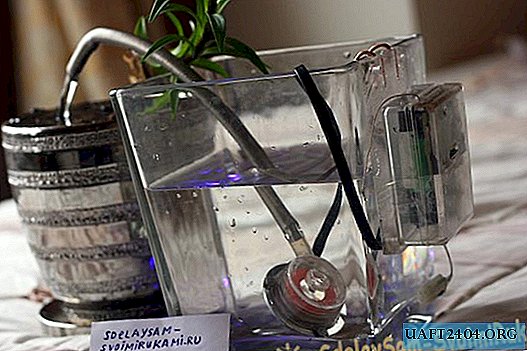
El diseño es una pompa (bomba) sumergida en un florero con un tubo de riego y una pequeña caja electrónica montada en el mismo florero con agua.
Entonces, para empezar, comencemos a hacer la bomba.
Necesitamos un CD, una botella de plástico con un volumen de 1.5 litros de leche (con un cuello ancho, diámetro interno de 33 mm.), Super pegamento, cuatro cables (tomé el cable dañado al cargar el iPhone), tres tornillos, arandelas y tres tuercas y un trozo de tubo flexible.
En la botella y corte el cuello con una sierra para metales exactamente a lo largo del borde de la "falda" y alinee la sección resultante con papel de lija, una lima o una barra.

De esta forma preparamos la llamada cámara de trabajo de la bomba.

Luego, necesitamos un disco CD, su orificio interno es exactamente del mismo tamaño que el motor, haremos un impulsor desde el disco.
El disco está bien cortado con unas tijeras, y es bueno si se calienta ligeramente en agua caliente para evitar el agrietamiento del borde cortado.
Quitamos la parte aserrada de la botella, nuestra cámara de trabajo, y la aplicamos exactamente al centro del disco con esa parte donde estaba la tapa de rosca. Marque un círculo con un marcador y córtelo con unas tijeras comunes. El disco resultante no será perfectamente liso, pero el papel de lija se puede corregir, lo principal es que el disco con un espacio libre mínimo puede caber dentro de la cámara de trabajo.
Resultó un anillo del futuro impulsor.

Ahora necesita hacer las palas para la "hélice". Para hacer esto, necesitará la mitad del disco. Dibujamos un marcador con una tira de 7 mm de ancho y lo cortamos con unas tijeras.

Pieles y nivelarlo.

A continuación, corte en seis partes iguales de 13 mm y doble con unos alicates en ambos lados.

El procedimiento adicional requerirá la máxima precisión, debe pegar las cuchillas una a la vez con superpegamento a la misma distancia.
Tenga en cuenta que las cuchillas están dobladas para que no introduzcan agua en la abertura de la cámara, sino más bien, como si estuvieran proyectadas desde el centro hasta el orificio en el borde. El motor solo girará en sentido antihorario. Puede arreglarlo ligeramente con una gota, alinearlo con pinzas y después de un poco de secado agregue pegamento a las partes faltantes.

Trate de evitar los humos tóxicos del segundo pegamento. Luego puedes secar y barnizar. En la punta de mis dedos solo había esmalte de uñas, es bastante duradero.
Entonces necesita un trozo de manguera flexible, por ejemplo, tomé un trozo del nivel de fluido de construcción.
Taladrar un agujero liso en la superficie roscada del cuello no es tan simple, primero tuve que practicar con un par de botellas, como resultado lo derretí suavemente con un soldador y lo limpié suavemente desde adentro para que la cuchilla no golpeara por irregularidades.
Insertamos un trozo de la manguera cortada en un ligero ángulo con esfuerzo en la abertura del cuello y lo fijamos con un pegamento transparente del tipo de momento. La abertura del tubo y la cámara debe ser de diámetro suficiente, aproximadamente 8 mm. Es aconsejable insertar el tubo no en ángulo recto con la carcasa, pero teniendo en cuenta el hecho de que el flujo rotará en sentido antihorario.


Para fijar el tubo, no es aconsejable usar superpegamento, ya que cuando se seca, estropea la superficie del plástico y la carcasa se vuelve turbia, perdiendo transparencia. Aquí, un sellador transparente o una goma de pegamento sobre una base de helio es genial.
Ahora queda ensamblar la bomba conectando la cámara al motor, centrar para asegurar la rotación libre de las cuchillas en el interior, sujetar con tornillos, sellar las ranuras con sellador transparente y pegar la cubierta transparente en la parte superior con un orificio en el medio de 14 mm.
Permítame recordarle que el impulsor girará estrictamente en sentido antihorario, esto es importante. Luego, suelde el cable de cuatro hilos al motor y barnice la soldadura, suelde el LED smd azul a uno de los devanados (a través de una resistencia de 1 kΩ), el ánodo al común. Ahora en el trabajo, parpadea bajo el agua.
Algunas palabras sobre motores de discos duros.
Algunos tipos de tales motores cuando giran el rotor con sus manos continúan girando notablemente en una dirección con un mejor deslizamiento que en la otra. Es decir, cuando intenta dar una rotación en el sentido de las agujas del reloj, el rotor se detendrá casi de inmediato. Dichos dispositivos tienen un diseño de rodamiento diferente y estos motores probablemente sean más adecuados para nuestros propósitos. Aunque tengo ambos tipos de trabajo en el agua durante mucho tiempo y vivo bien.
Los devanados se comprueban así. El motor debe estar con cuatro contactos. Necesitamos encontrar uno de los contactos extremos que es el punto medio. Esta salida se conectará al power plus, el resto en orden (el primero, el segundo y el tercero) se conectarán a los mosfets. El probador mide la resistencia entre todos los contactos adyacentes. Menos resistencia mostrará uno de los contactos extremos.
Esto es común, está en un autobús positivo. Es muy conveniente fijar el cable en la carcasa del motor, para esto puede perforar un par de agujeros milimétricos y presionar este cable con un soporte de cobre. Cuando la bomba está lista, se coloca una manguera curva en su boquilla con un diámetro interno de al menos 8 mm. y 20 cm de largo a través del cual se realizará el riego. Ahora puede hacer una placa de circuito impreso y soldar el dispositivo.
El tablero está hecho de fibra de vidrio unilateral por el método LUT.
Le llamo la atención sobre el hecho de que la imagen de la traza y el diseño de la placa de circuito impreso no se refleja para facilitar la verificación durante la instalación. Al imprimir LUT, debe rotarlo en espejo o usar el archivo SprintLayout en el archivo.

El tablero también se puede pintar con esmalte de uñas de esta manera:
La varilla del bolígrafo se calienta (¡un poco!) Por encima de la llama del encendedor, girando de manera uniforme y tirando de manera uniforme. A continuación, el extremo delgado se corta con una cuchilla. De este modo, se obtiene un tubo cónico con una salida muy pequeña. Se puede insertar dentro de una jeringa con un volumen de 1,5 cm cúbicos, y después de haber escrito previamente un esmalte de uñas regular, dibuje las pistas de los conductores impresos en la placa de circuito.
Después del secado, el tablero se baja a la solución de decapado. Puede ser una mezcla de sulfato de cobre con 1: 3 de sal y agua. La solución se prepara lo más concentrada posible. Se requiere calentamiento, por ejemplo, por encima de la llama de la vela. El proceso se acelera con agitación constante. El vitriolo azul se vende en cualquier tienda agrícola.

El microcontrolador funciona con un estabilizador de voltaje paramétrico montado en los elementos D1, R7, Q1.
El valor de la resistencia se selecciona de modo que el consumo propio del estabilizador sea lo más bajo posible. Mucho más bajo que el llamado "Krenki".
Tal solución esquemática redujo el consumo a 0.3 mA.
Esto es muy importante, ya que la duración de la operación de nuestro diseño sin recargar las baterías depende de esto.
Transistor Q1 - npn no es crítico.
Tensión de estabilización de diodo Zener 5.1 V. Es posible cobrar por el móvil. Resonador de cuarzo - 32.768 kHz. Reloj normal de cuarzo. De relojes de cuarzo. Como claves en el circuito, se utilizan los MOSFET soldados de la placa del sistema de la computadora anterior. LED SMD. Lata de tira de LED.
Altavoz: cualquier adecuado en tamaño. Puedes hablar desde un teléfono móvil.
La instalación del circuito debe comenzar con un estabilizador de voltaje y luego medir el voltaje en su salida (condensadores C2 y C3). Debe ser de 5 voltios. Luego puede soldar el microcontrolador y todo lo demás.
En el circuito, los pines no utilizados y divorciados de los puertos del microcontrolador PB0, PB1, PD6 se pueden usar para conectar periféricos.
El algoritmo del programa del microcontrolador se construye de la siguiente manera.
El controlador está configurado para funcionar en modo asíncrono. Las interrupciones ocurren una vez por segundo, en este momento el programa cuenta el tiempo, parpadea por un corto tiempo con un LED (cada 10 segundos) e inmediatamente pasa al modo de suspensión para ahorrar consumo de energía. Si el contador de horas se vuelve igual a cero (inmediatamente después del restablecimiento con el botón o después de 24 horas), la fuente de alimentación del controlador se mide cuatro veces y se compara con la fuente de referencia de voltaje interno. Si el voltaje es más bajo que el permitido, el circuito emite señales de sonido periódicas que informan de una batería baja, después de quince señales, el controlador se configura en modo de apagado y pasa al modo de suspensión hasta la próxima recarga de las baterías.
Si el voltaje está por encima del valor umbral, se activa una señal de sonido y el LED se ilumina. A continuación, se establece la posición inicial del rotor del motor y se aplican secuencialmente impulsos a corto plazo a los devanados del motor. La duración de los pulsos y las pausas entre su sucesión se reducen gradualmente, por lo tanto, un conjunto de revoluciones del motor y una mayor rotación constante de la cuchilla, proporcionando así una porción exacta de riego. El LED parpadea sincrónicamente.
Al final del riego, el circuito vuelve al modo de espera para contar el tiempo. En este modo, se encuentra la mayor parte del tiempo, esto asegura una alta eficiencia del consumo de energía (aproximadamente 0.3 mA).
Durante el programa principal, el controlador se sincroniza desde el oscilador interno con una frecuencia de 8 MHz, y en modo inactivo: el reloj de cuarzo externo le permite calcular la hora con precisión.
Cortos destellos del LED cada 10 segundos indican el funcionamiento del dispositivo. Desde el comienzo de la puesta a cero de los segundos, parpadeará 30 minutos y luego los parpadeos se detendrán durante 12 horas y se reanudarán después de otras 12 horas. Por lo tanto, si establece el riego a las 00 en punto, el parpadeo no ocurrirá en la noche, sino solo a partir de las 12 en punto de la tarde.
Archivo de firmware Dviglo_mega_avr_V.hex
Cuando parpadea, debe configurar el archivo Dviglo_mega_avr_V.rar para que funcione desde el oscilador RC interno de fuentes de 8 MHz en el programa VR Studio
Si tiene una placa arduino, no necesita un programador. (instrucciones detalladas)
Archivos en la carpeta proshivka_arduinoi.
Cuando parpadea, debe configurar el archivo Dviglo_mega_avr_V.rar para que funcione desde el oscilador RC interno de fuentes de 8 MHz en el programa VR Studio
Si tiene una placa arduino, no necesita un programador. (instrucciones detalladas)
Archivos en la carpeta proshivka_arduinoi.
Archivo con materiales para el artículo. Disponible para descargar solo para usuarios registrados.
Atencion No tiene permiso para ver texto oculto.

Operación del dispositivo de video:
Share
Pin
Tweet
Send
Share
Send









